Real Time Voxellic Reconstruction |
[PowerPoint presentation] [pdf of the subject]
1. Introduction
This subject is part of the CYBER-II project.
In the context of Augmented Reality applications, the goal of the Cyber-II project is to simulate, in real-time, the presence of a person (e.g. a TV presenter or a teacher) in a virtual environment. This simulation consists mainly in visualizing the combined scenario, and providing tools for interaction between the real person, the virtual environment, and the observer (e.g. TV spectator or student). The main overall technical requirements are thus a highly realistic visualization, which works in real time.
2. Master thesis
The shape that can be estimated from the different silhouettes is the visual hull [Lau94] of the objects under construction. The visual hull is in fact the maximal solid shape consistent with the object silhouettes. Several approaches have been proposed to compute this visual hull, which are divided into the following two categories: volume based approaches and surface based approaches.
2.1 Voxel carving
Space carving approaches [SCMS01, Dye01] operate on a discrete space (typically a voxel cube) and mark each space element according to its projection in the images from different viewpoints. Voxels that are projected outside the object's silhouette in one of the images cannot belong to the object (see Figure 1 and 2). These techniques are quite robust, easy to implement, and guarantee to produce an approximation to the result, commensurate with the chosen resolution.
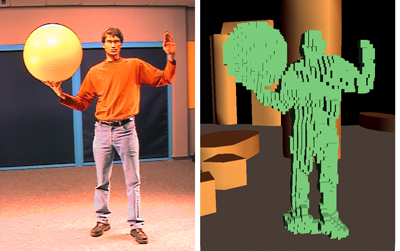
Figure 1: Voxelic reconstruction of an actor.
Figure 2: Principle of voxel carving with three cameras for a sphere.
2.2 Surface based approaches
Surface based approaches [CG99, MBM01] are not well suited to our application primarily because of the complexity of the underlying geometric calculations. Incomplete or corrupted surface models can be created, and ill-shaped polygons can produce rendering artifacts.
Fig 3: Surface based approaches (from FMBR04)
2.3 Goal
We observe that the voxel carving approach is essentially a boolean operation on a number of silhouette volumes, computing their intersection. Such boolean operations can be computed on images during a texture mapping step by graphics hardware (see HLS04 for more details).
The first results are encouraging as seen in the video below:


The goal of this master thesis is to use this texture approach to produce a real time voxel reconstruction, based on a grid bigger than 10243. To do this, we must use the new functionalities of the GPU, PCI bus... But, hardware is not enough, we must reorganize data to pack it and imagine new approches to pass over the limitation of texture size (40962).
An extension is to use non-binary data to produce volumitric models. Such data could be the output of medical scanner like Magnetic Resonance Imaging...
3. Supervisor
4. Bibliographie


[CG99] R. Cipolla and P.J. Giblin.
Visual Motion of Curves and Surfaces.
Cambridge University Press, 1999.
[Dye01] Charles Dyer.
Volumetric scene reconstruction from multiple views.
In L. S. Davis, editor, Foundations of Image Understanding, pp 469-489. Kluwer, 2001.
[Lau94] A. Laurentini.
The visual hull concept for silhouette-based image understanding.
PAMI,16(2):150-162, February 1994.
[MBM01] Wojciech Matusik, Chris Buehler, and Leonard McMillan.
Polyhedral visual hulls for real-time rendering. In Eurographics Workshop on Rendering,
pp 115-126, 2001.
[SCMS01] G. Slabaugh, B. Culbertson, T. Malzbender, and R. Schafe.
A survey of methods for volumetric scene reconstruction from photographs.
In International Workshop on Volume Graphics, 2001.